【構想1】
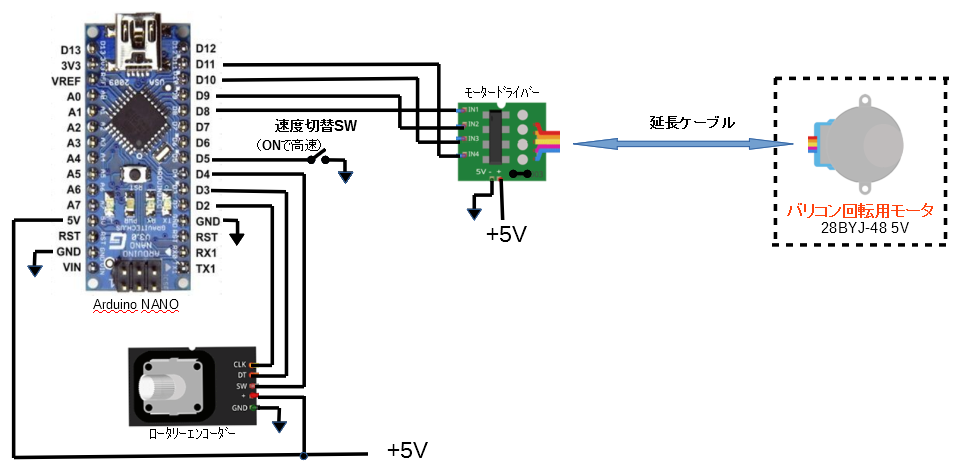
そこでローターリーエンコーダーでステッピングモーターを回すことを考え、マイコンは安価で入門書も多いArduinoにしました。
その昔BASICしか使った事が無い身でしたが、何とか基本の動作をさせる事が出来ました。
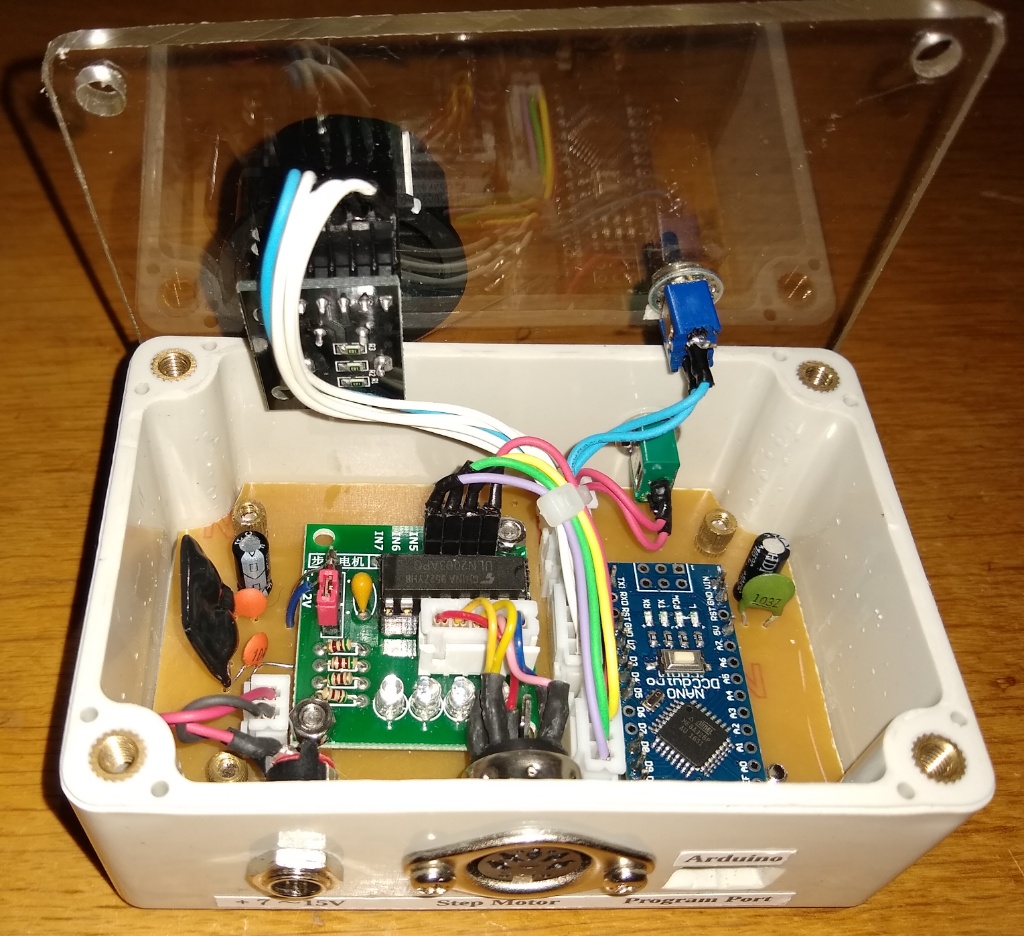
モータードライバーユニットはステッピングモーター(28BYJ-48)に付属のULN2003を使った物を使用しています。
なおステッピングモーターが停止していても相当熱くなることがわかり、消費電力低減の為に停止後にモーター電源をプログラムで遮断しました。
特徴:
1)小型(ケースは 100x67x40mm)です。
2)低消費電流です。モーター停止時は13mA程度です。上記の電力低減処理の結果です。リチウムイオンの9V電池(中華製400mAH?と表記あり)で動作可能です(要5Vレギュレーター)。
(これをさらに減らすにはUSBインターフェースの無いArduino Pro Miniを使いスタンバイモードを利用して下さい。)
また、モーター動作時で300mA程度です
3)後日作ったループアンテナで試したところ、チューニング時のノイズはほとんどありませんでした。
動く事が解ったので、ケースに収まっているバリコンの角度を手元で表示させたいと思うのは至極当たり前のことです。しかし何せ勉強不足で、グラフィック液晶をどうやって表示させたらいいか暫く考えたり本を調べたりしましたが良く解りませんでした。
さらに、エンコーダーを回しているうちにミスカウントしてモーターの動きがズレる事が解りました。そうなるとマイコンに格納された回転角のデーターでバリコンの位置を表示させても、液晶の角度表示とバリコンの角度とのズレが生じる恐れがあります。
その上、起動時にバリコンの位置がどこにあるか解らないことも大きな問題でした。
改善策としてバリコンの位置をセンサーでフィードバックすることは考えましたが、延長ケーブルの芯線の数が増えてしまいます。
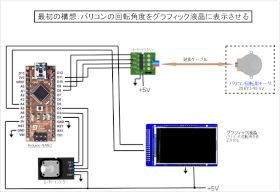
上記は構想だけに終わったグラフィック表示
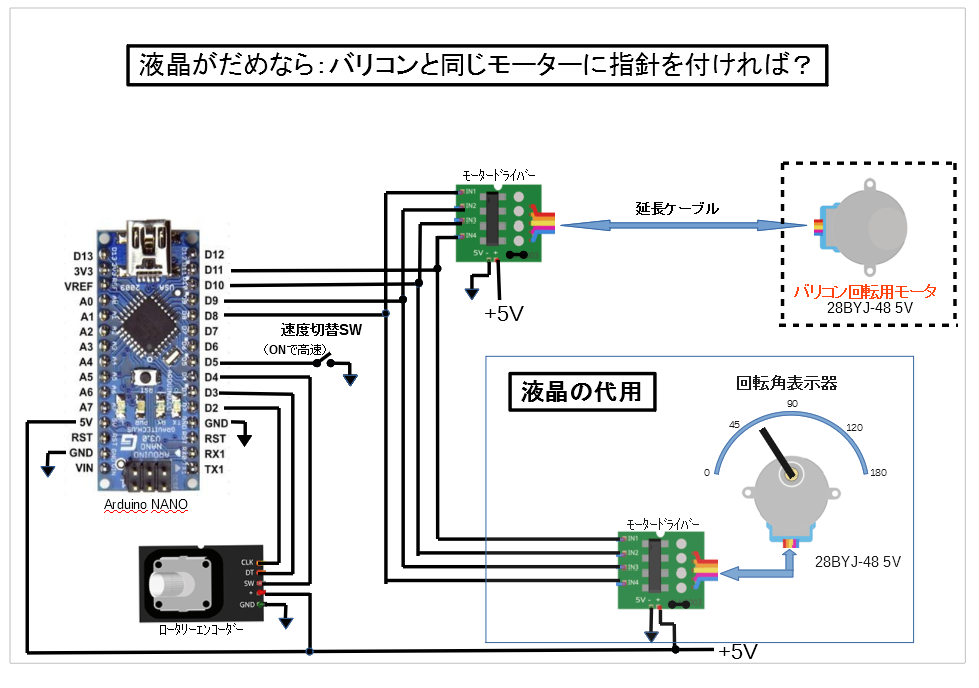
【構想2】
色々考えているうちに、「遠隔操作先のバリコンと同じ条件を手元のコントローラーに置けばいい」事に気が付きました。
モーターの回転位置はマイコンから出るパルスが同じなので、二つとも同じ動きをします。しかもで電源を切ってもその位置をメモリーしています。万が一エンコーダーの信号をミスカウントしても同じ動きなので二つのモーターの停止位置は同じです。
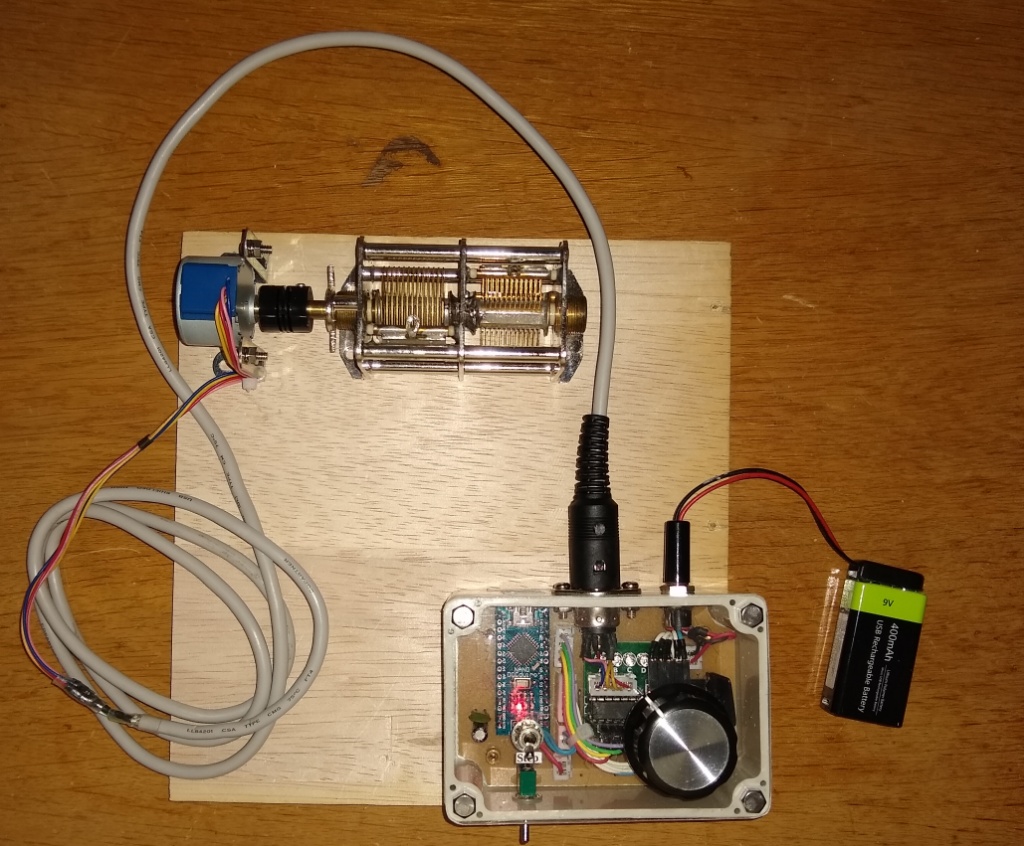
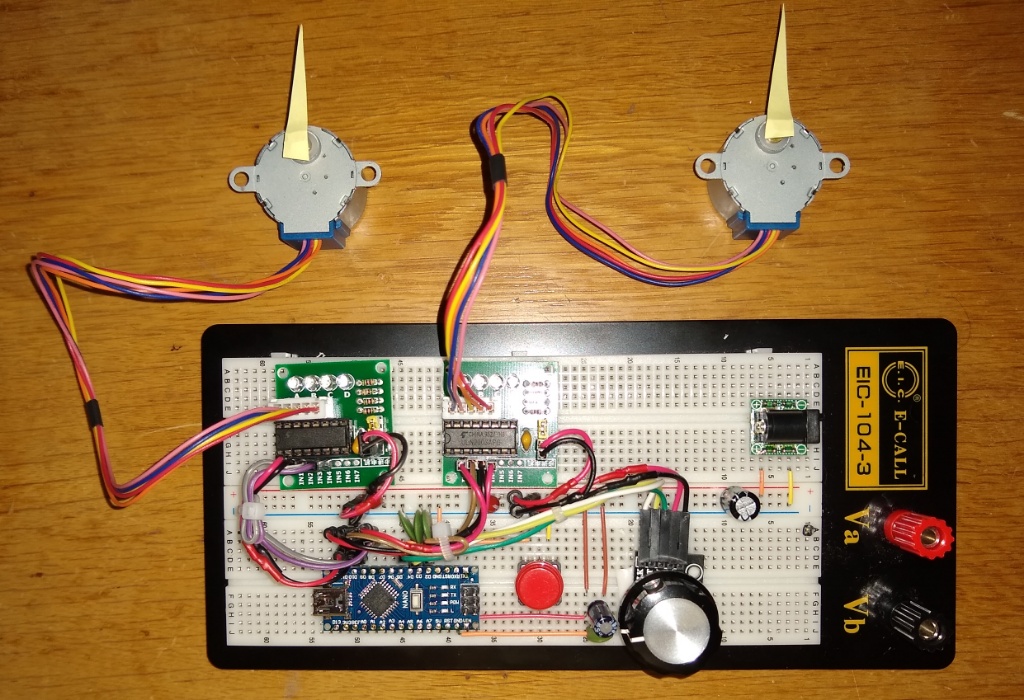
早速下記の回路で実験しました。当然ですが期待通りの動作をしましたので、一寸古風なラジオ風に仕上げてみました。(写真右端)
特徴:
1)ケースは140x90x45mmです。中はスカスカなので一回り小さくする事は容易でしょう。電池内蔵も可能です。
2)インジケーター付きなので手元でバリコンの角度がわかります。
3)チューニング時のノイズは殆どありません。
4)消費電流はモーター停止時13mA程度、動作時600mA程度です。

ダイヤル目盛の下のスイッチは左から
1)電源スイッチ
2)最初にバリコンの位置と表示の位置を合わせる為のスイッチ・・・押している間はバリコンは停止しており表示のモーターだけが回ります。バリコンの位置と同じになったら離します。よく考えれば最初に必要なだけなので、側面等の目立たないところにひっそりと取り付けるべきでしょう。
3)粗調整用のモーターのステップ調整。つまり早回しスイッチです。ONにすると指定した倍率のステップで回ります。オフで20:1 オンで7:1程の回転比(つまみ :バリコン)です。気に入った比率が決まれば、実際のセットにはこのスイッチは不要でしょう。
4)バリコンの回転角のリミットスイッチが必要な場合、コントローラー側のモーター(ダイヤル側)に取付てやれば(バリコンからの長いケーブルによるフィードバック信号は不要なので)同じ基板内で検出と処理が出来ます。
QRP用に2連エアバリコンを使う時はバリコンが180度しか回らないのでこの処理が必要でしょうが、バリコン側に付けなくて良い事からケーブルの芯数増加を防げます。
5)磁気ループアンテナの試作機を作ってノイズを確認しましたが殆ど気にならないレベルです。また回り込みは5Wでは発生していません。
6)その他
回路図にあるように二つのモータードライバーユニットへの配線が異なります。これはモーターのバリコンへの取付方向とダイヤル用のモーターの取付方向が異なるからです。この為、二つは逆転する配線になっています。